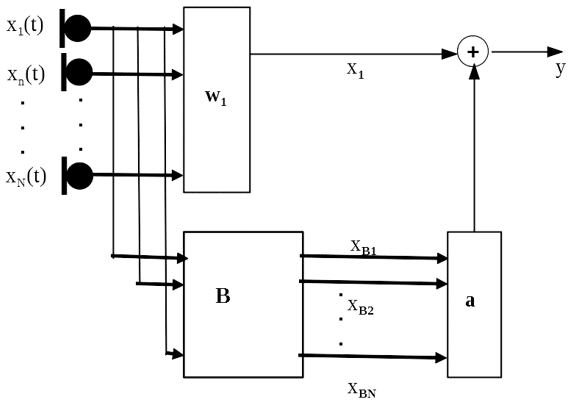
Generalized Sidelobe Canceler can be considered as a special case of Linear constrained Minimum Variance (LCMV) beamforming. It is one of the early beamforming approaches in practice.
For LCMV, we formulate the linear constraints as below,
 = c")
where c is the desired vector derived from the priori knowledge of the target source and C denotes a linear matrix which forces ") into the desired vector c. Obviously
into the desired vector c. Obviously \") may not be unique. A commonly chosen solution is
may not be unique. A commonly chosen solution is
^{-1}c") ,
,
where  is the minimum L2-norm solution. It is also referred to as the fixed beamformer.
is the minimum L2-norm solution. It is also referred to as the fixed beamformer.
With this fixed beamformer, we convert the original linearly constrained beamforming problem into a dimension-reduced optimization problem.
Let S be the subspace that defined as

and
 ,
,
 = ML - C")
we call B, the blocking matrix. Obviously, B is not unique. The following combination expands the entire beamforming space,
\left(p\right)")
and
 .
.
Therefore, the linear constraint imposed on LCMV is observed into the optimization objective function.
}{min}}{\left({w}_1+B{a}\left(p\right)\right)}}^TR{{xx}}\left({w}_1+B{a}\left(p\right)\right)")
Now the problem can be easily solved with the standard Wiener solution,
\}")
The implementation can be naturally carried out in an iterative fashion. The involved computation is equivalent to the LCMV since B and are both pre-calculated.