Resolution of the angle of arrival of speech signals impinging on a microphone array is critical for beamforming and noise reduction in online applications. Due to computation and memory constraints of embedded DSPs, an efficient but fast algorithm is required to achieve any meaningful gains for beamforming. In speech processing, frame lengths on orders of  milliseconds are typical, further buttressing the need for a quick resolution of algorithms. The problem we wish to tackle is as follow: Given
milliseconds are typical, further buttressing the need for a quick resolution of algorithms. The problem we wish to tackle is as follow: Given  frame recordings of a single source of speech, one frame recording for each microphone, each frame having
frame recordings of a single source of speech, one frame recording for each microphone, each frame having  samples, determine the angle of arrival of the signal assuming a far field model. Figure 1 illustrates a typical microphone array.
samples, determine the angle of arrival of the signal assuming a far field model. Figure 1 illustrates a typical microphone array.
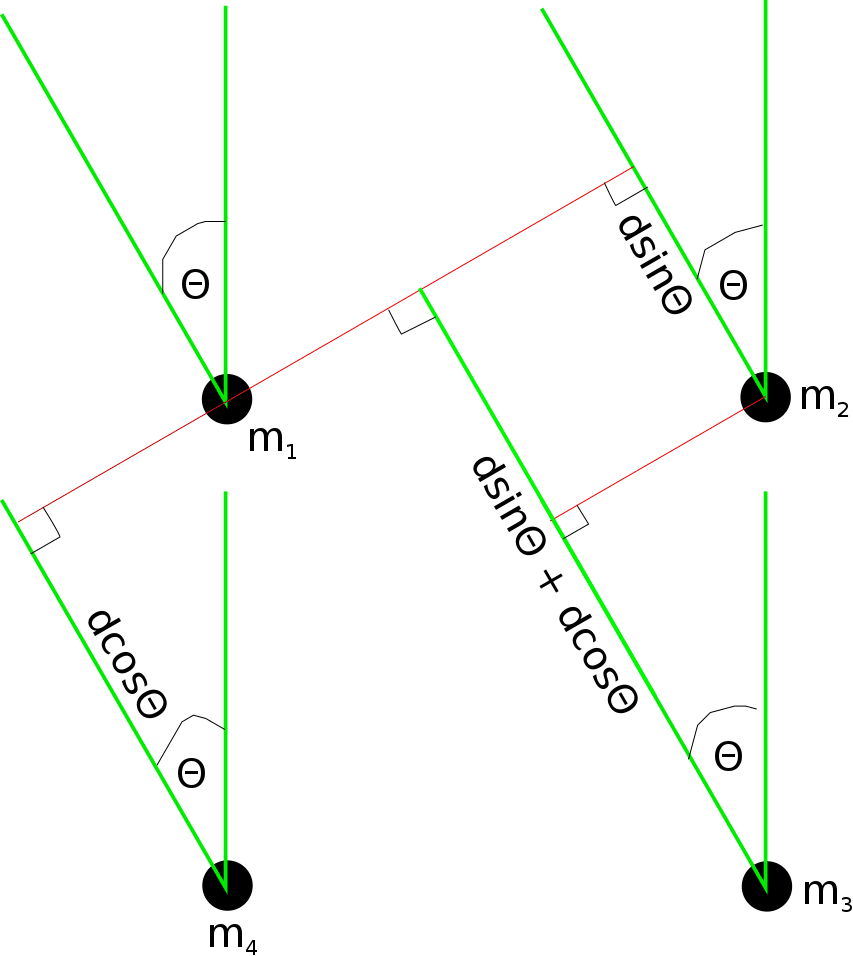
Figure 1: Square microphone array.
We limit our analysis to the  -D case for brevity of presentation. The general approach is to use cross-correlation to find the delay between paired microphones. GCC-PHAT however requires
-D case for brevity of presentation. The general approach is to use cross-correlation to find the delay between paired microphones. GCC-PHAT however requires ") additions and multiplications because the DFT’s of both signals need to be computed. Here,
additions and multiplications because the DFT’s of both signals need to be computed. Here,  . A faster approach will be to find the cross-correlations by leveraging the known maximum delay between a pair of microphones. This approach reduces the number of computations to
. A faster approach will be to find the cross-correlations by leveraging the known maximum delay between a pair of microphones. This approach reduces the number of computations to ") , where L is the maximum number of samples that can be delayed. The maximum delay on a typical DSP platform with a microphone spacing of
, where L is the maximum number of samples that can be delayed. The maximum delay on a typical DSP platform with a microphone spacing of  will be as small as 2 samples using a sampling rate of
will be as small as 2 samples using a sampling rate of  , thus making our approach at least 4 times faster than the so called GCC-PHAT and other DFT based approaches. For the illustrated microphone array in Figure 1, define the time delay between microphone
, thus making our approach at least 4 times faster than the so called GCC-PHAT and other DFT based approaches. For the illustrated microphone array in Figure 1, define the time delay between microphone  and microphone
and microphone  as
as  , with
, with  and
and  being the arrival times of a common sample data. Define the speed of sound as c. Let
being the arrival times of a common sample data. Define the speed of sound as c. Let  be the distance between consecutive microphones
be the distance between consecutive microphones  and
and  , as labeled on Figure 1, such that
, as labeled on Figure 1, such that  . Also let the distance between and be
. Also let the distance between and be  for
for  =2}") . Then the time difference of arrival of signals at the microphone arrays obey the following:
. Then the time difference of arrival of signals at the microphone arrays obey the following:

Here, the  ‘s are estimated using pairwise correlations using:
‘s are estimated using pairwise correlations using:
![\underset{k \in [-L,L]}{\mathrm{argmax}}~ crr[k] = \sum\limits_{n=1}^{N} x_i[n]x_j[k+n], i \neq j, \{i,j\} \in \{1, \cdots, M\}](https://s0.wp.com/latex.php?latex=%5Cunderset%7Bk+%5Cin+%5B-L%2CL%5D%7D%7B%5Cmathrm%7Bargmax%7D%7D%7E+crr%5Bk%5D+%3D+%5Csum%5Climits_%7Bn%3D1%7D%5E%7BN%7D+x_i%5Bn%5Dx_j%5Bk%2Bn%5D%2C+i+%5Cneq+j%2C+%5C%7Bi%2Cj%5C%7D+%5Cin+%5C%7B1%2C+%5Ccdots%2C+M%5C%7D&bg=ffffff&fg=000000&s=2 "\underset{k \in [-L,L]}{\mathrm{argmax}}~ crr[k] = \sum\limits_{n=1}^{N} x_i[n]x_j[k+n], i \neq j, \{i,j\} \in \{1, \cdots, M\}")
where the ![x_i[n]](https://s0.wp.com/latex.php?latex=x_i%5Bn%5D&bg=ffffff&fg=000000&s=0 "x_i[n]") ‘s are sampled data
‘s are sampled data  at microphone . The inter-sample delays may also be dealt with by simply using the adjacent bins near the peak. For example, suppose the peak of the correlation was at the
at microphone . The inter-sample delays may also be dealt with by simply using the adjacent bins near the peak. For example, suppose the peak of the correlation was at the  sample, then we will use the intersample value of:
sample, then we will use the intersample value of:
![\hat{k} =\frac{2k crr[k]-(k-0.5)crr[k+1]-(k+0.5)crr[k-1]}{2crr[k]-crr[k-1]-crr[k+1]}.](https://s0.wp.com/latex.php?latex=%5Chat%7Bk%7D+%3D%5Cfrac%7B2k+crr%5Bk%5D-%28k-0.5%29crr%5Bk%2B1%5D-%28k%2B0.5%29crr%5Bk-1%5D%7D%7B2crr%5Bk%5D-crr%5Bk-1%5D-crr%5Bk%2B1%5D%7D.+&bg=ffffff&fg=000000&s=2 "\hat{k} =\frac{2k crr[k]-(k-0.5)crr[k+1]-(k+0.5)crr[k-1]}{2crr[k]-crr[k-1]-crr[k+1]}.")
As a custom design house, VOCAL Technologies’ angle of arrival algorithms are applicable to a wide range of the microphone arrays that exist in reverberation environments. The selection of the algorithm is based on the requirements of the application and the available hardware configuration.