Interpolation is the process of estimating unknown values of a signal given a set of known values of the same signal. Interpolation essentially is able to estimate particular missing data points by taking a weighted average of nearby given data points. Applications of interpolation include (but are not limited to) D/A conversion, sampling rate conversion, signal restoration, and fractional delay filters.
Mathematically, interpolation can be modeled by the block diagram system below.
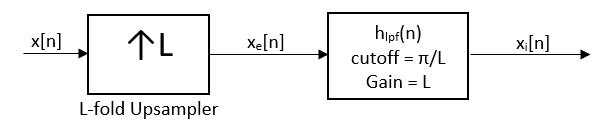
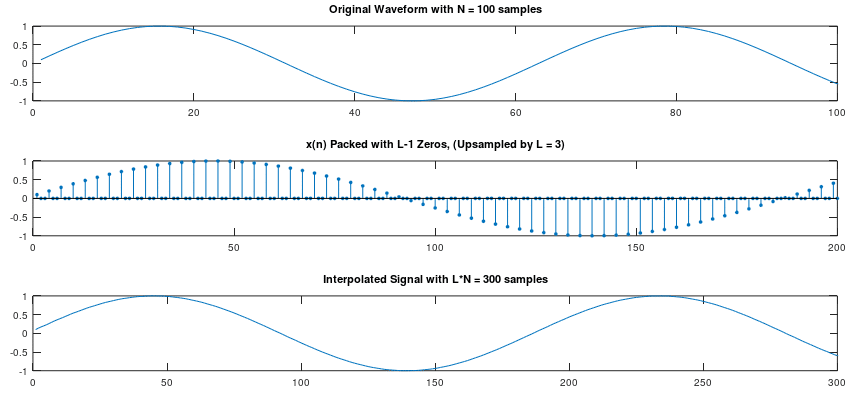
A given discrete signal x[n] must first be upsampled to zero-pack the signal with L-1 zeros. Zero-packing is simply the process of inserting zeros in between the samples of x[n]. The resulting signal ") will have L times as many samples as the original signal x(n). Upsampling can be described mathematically as:
will have L times as many samples as the original signal x(n). Upsampling can be described mathematically as:
![x_e(n) = \sum_{k = \infty }^{\infty } x[k]\delta [n-kL]](https://s0.wp.com/latex.php?latex=x_e%28n%29+%3D+%5Csum_%7Bk+%3D+%5Cinfty+%7D%5E%7B%5Cinfty+%7D+x%5Bk%5D%5Cdelta+%5Bn-kL%5D+&bg=ffffff&fg=000000&s=0 "x_e(n) = \sum_{k = \infty }^{\infty } x[k]\delta [n-kL]") (1.1)
(1.1)
Subsequently, the upsampled signal xe[n] must be convolved with the impulse response of a low-pass filter with cutoff frequency  , and gain L. The equation for the ideal low-pass filter with cutoff and gain L is given as:
, and gain L. The equation for the ideal low-pass filter with cutoff and gain L is given as:
 = \frac{1}{2\pi }\int_{\omega _{c}}^{\omega _{c}}Le^{j\omega n}d\omega = \frac{sin(\pi n/L))}{\pi n/L}") (1.2)
(1.2)
By performing the following convolution, the upsampled signal is interpolated to obtain$latex<\x_i[n]>$. Given a signal x[n] with N total samples, the interpolated signal xi[n] will have N*L total samples. Figure 1 on the following page demonstrates the application of interpolation on a sinusoidal waveform. Note that, in order to perfectly reconstruct the ideal desired signal, an infinite amount of filter taps must be used.
![x_{i}(n) = h_{lpf}[n]*x_{e}[n] = \sum_{k = -\infty }^{\infty }x_{e}[k]h_{i}[n-k] = \sum_{k = -\infty }^{\infty }x_{e}[k] sinc[\pi (n-k)/L]](https://s0.wp.com/latex.php?latex=x_%7Bi%7D%28n%29+%3D+h_%7Blpf%7D%5Bn%5D%2Ax_%7Be%7D%5Bn%5D+%3D+%5Csum_%7Bk+%3D+-%5Cinfty+%7D%5E%7B%5Cinfty+%7Dx_%7Be%7D%5Bk%5Dh_%7Bi%7D%5Bn-k%5D+%3D+%5Csum_%7Bk+%3D+-%5Cinfty+%7D%5E%7B%5Cinfty+%7Dx_%7Be%7D%5Bk%5D+sinc%5B%5Cpi+%28n-k%29%2FL%5D&bg=ffffff&fg=000000&s=0 "x_{i}(n) = h_{lpf}[n]*x_{e}[n] = \sum_{k = -\infty }^{\infty }x_{e}[k]h_{i}[n-k] = \sum_{k = -\infty }^{\infty }x_{e}[k] sinc[\pi (n-k)/L]") (1.3)
(1.3)