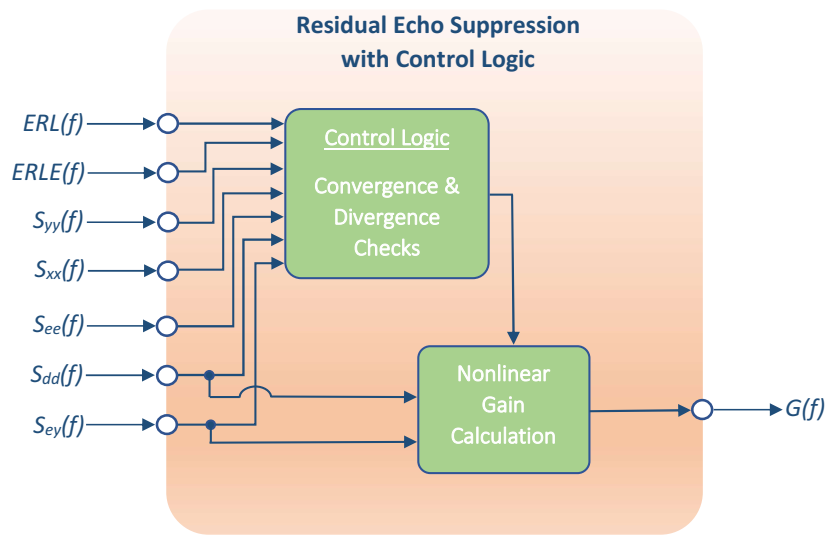
Cross Spectral Residual Echo Suppression implemented in the frequency domain for Nonlinear Processing of residual echoes needs additional control logic. Just like the adaptive filter portion of the echo canceller, control logic helps to achieve the best overall performance. Revisiting the formula from, Cross Spectral Residual Echo Suppression:
=\ \frac{S_{ey(f)}}{S_{ey(f)}+\alpha S_{dd(f)}}")
If the system has not converged, then the gain function will be approaching a value of 1. Thus, the first aspect of the control logic is to see if the adaptive filter has begun to converge. Reviewing the echo return loss (ERL) and echo return loss enhancement (ERLE) statistics provide some insight on the convergence state. However, due to the need to collect data over a relatively long period of time (a few seconds), there can be a lag between the actual convergence state and what the ERL and ERLE indicate. Therefore, the instantaneous signal powers also need to be checked.
One convergence check can be the power level of the predicted echo. In order for this suppression rule to be used, the predicted echo power must meet the minimum requirements.
If the error signal is greater than the microphone signal, then the adaptive filter is likely in a divergent state. When in a divergent state, the gain function can produce a whole range of values between 0 and 1. Thus, the gain function should be forced to take a value near 0.