In signal processing, we often encounter problems that the time delay of a signal is required to perform certain operation. The signal model is usually modeled as below,
=\alpha x\left(t-T_d\right)+n\left(t\right)")
The pure delay term,  , can be used for many applications such as system diagnosis, radar ranging, direction of arrival, velocity measurement etc. More generally, we may model multipath channel as below,
, can be used for many applications such as system diagnosis, radar ranging, direction of arrival, velocity measurement etc. More generally, we may model multipath channel as below,
=\sum_{i\ =\ 1}^{M}{\alpha_ix\left(t-T_i\right)}+n\left(t\right)")
In this paper we only consider algorithms that can handle time delay being fractional. The problem can be formulated as below. The short duration signal shown in Figure 1 a) is the generating signal ") , and Figure 1, b) is the delayed signal
, and Figure 1, b) is the delayed signal ") .
.
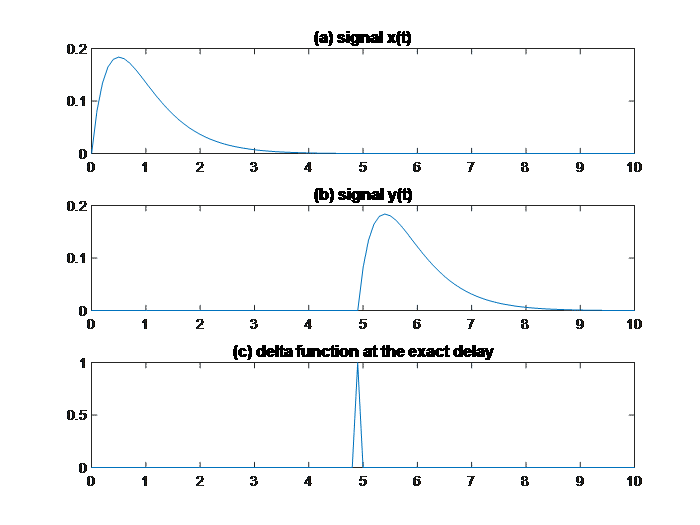
The signal and can be mathematically connected by an impulse function, as shown in Figure 1 c), through convolution,
=\alpha\delta\left(t-T_d\right)\ast x\left(t\right)+n\left(t\right)")
In reality, ") may or may not be available. Our goal is to recover the impulse response function
may or may not be available. Our goal is to recover the impulse response function ")
.
We ignore the noise term ") for simplicity. In frequency domain,
for simplicity. In frequency domain,
 = X\left( f \right) e^{\left(j2\pi T_d\right)}")
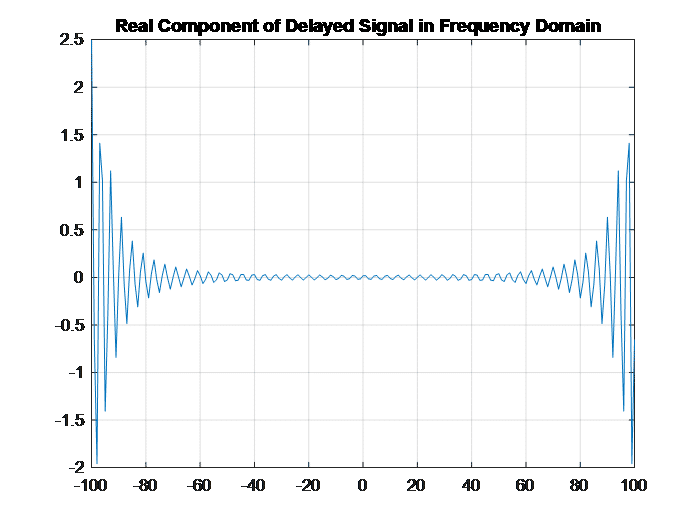
and if we take the real component only,
\}=Real\{A\left(f\right)\}cos\left(2\pi T_df+\phi\left(f\right)\right)")