Frequency locking is essential for untethered sensor nodes forming a maximum beam at a receiver. Due to duplexing by the transmitter sensors, the master node has to be transmitting at a different frequency whiles the beamforming nodes transmit at a frequency. Examples of applications of such a setup include networks of wireless, radar and acoustic nodes with limited power supply co-operating to send a common beam of local data to a fusion center. For a sensor network receiving an unmodulated tone to all transmitters for frequency locking, we employ a two-stage modified Costas loop. The first stage is the analysis stage where the individual local oscillator frequency drifts and phase offsets are extracted. Note that each beamforming sensor has a unique frequency drift and phase offset. Figure 1 illustrates a typical frequency drift and phase offset estimation.
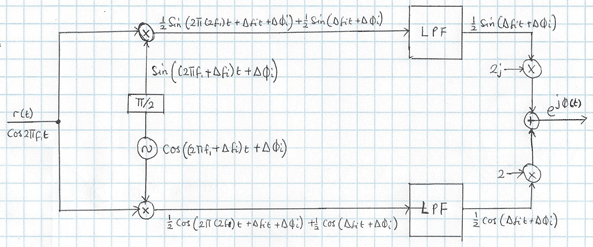
Figure 1: Frequency drift and phase offset of local oscillator estimation to synthesize the signal
The output from Figure 1 is fed into a modified costas loop to synthesize a frequency locked signal at each sensor. Note that the synthesized signals may have different phase offsets which will be synchronized using the 1-bit feedback signal from the receiver node. The feedback contains the received signal strength intensity (RSSI) of the current epoch, broadcast to all transmit nodes. The transmit nodes use the information in the feedback signal to decide whether to keep or discard the previous random phase perturbation before a new one is applied based on whether the RSSI increased or decreased at the fusion center. Also notice that the local oscillator drift at each transmit node is absent in the synthesized output signal. Figure 2 illustrates the modified Costas loop.
Figure 2: Modified Costas loop to synthesize frequency locked transmit signals